Lockheed Martin-Built Phoenix Spacecraft Successfully Lands On Mars
NASA Spacecraft will Study Water-Ice on the Northern Planes of Mars
DENVE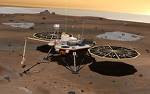 R, May 25th, 2008 -- NASA has a new spacecraft operating on the surface of Mars. This afternoon, the Phoenix Mars Lander, built by Lockheed Martin [NYSE: LMT], navigated a dramatic blazing descent through the planet’s atmosphere, positioning Phoenix to dig down and touch the planet’s subsurface ice.
R, May 25th, 2008 -- NASA has a new spacecraft operating on the surface of Mars. This afternoon, the Phoenix Mars Lander, built by Lockheed Martin [NYSE: LMT], navigated a dramatic blazing descent through the planet’s atmosphere, positioning Phoenix to dig down and touch the planet’s subsurface ice.
At 4:24 p.m. Pacific Daylight Time today, onboard software commands fired six separation nuts and jettisoned the cruise stage of the spacecraft while it was 635 miles away from the surface. That started a series of events that took the spacecraft through six different configurations and from a speed of 12,500 mph to a gentle touchdown on the surface. The data signal confirming the spacecraft had successfully landed was received on Earth at 4:53 p.m.
“Phoenix is an amazing machine and it was built and flown by an amazing team. Through the entire entry, descent and landing phase, it performed flawlessly,” said Ed Sedivy, Phoenix program manager at Lockheed Martin Space Systems Company. “The spacecraft stayed in contact with Earth during that critical period and we received a lot of data about its health and performance. I’m happy to report it’s in great shape.”
Flight operations since launch and through landing were performed by a tight-knit team in Pasadena and Denver. Mission management and navigation were handled by JPL and spacecraft operations were performed by Lockheed Martin. The joint team stayed in daily contact with the spacecraft through the Deep Space Network since its launch on Aug. 4, 2007.
“We are absolutely delighted by the successful landing of the Phoenix spacecraft,” said Jim Crocker, vice president of Sensing & Exploration Systems at Lockheed Martin Space Systems Company. “Years of patience, planning, preparation and teamwork paid off handsomely this afternoon. We’re very proud to have played a role in another one of NASA’s exciting voyages of exploration.”
After landing, the spacecraft waited 20 minutes for dust to settle before it deployed its stereo camera, meteorology mast, robotic arm bio-barrier bag and, most importantly, its twin solar arrays. The camera took images of each 6’ 10” solar array which confirmed both were fully deployed allowing the spacecraft to generate its own power. It also took other pictures of a lander foot pad and instruments on the lander’s deck. Those images were returned to Earth via the Mars Odyssey orbiter at 6:47 p.m.
“We’ve passed the hardest part and we’re breathing again,” said JPL’s Barry Goldstein, Phoenix project manager. “Seeing the images that Phoenix sent back after a successful landing reaffirmed the thorough work over the past five years by a great team.”
The University of Arizona leads this first Mars Scout mission for NASA from its Lunar and Planetary Laboratory in Tucson. Most of the scientific study for the mission will be performed out of the university’s Science Operations Center. The NASA mission, valued at $420 million, includes the spacecraft development, science instruments, the Delta II launch vehicle, mission operations and science operations.
“I’m truly pleased that we are back at Mars. The journey feels much longer than 422 million miles. We have gone through challenges and trying times, and now we’re going through jubilation,” said Peter Smith, of the University of Arizona, principal investigator for the Phoenix mission. “I’m very grateful of NASA, JPL and Lockheed Martin for making this mission a reality and for allowing us to advance the scientific study of our neighboring planet.”
Two NASA orbiters, Mars Reconnaissance Orbiter and 2001 Mars Odyssey, played major roles in getting Phoenix safely to the ground. Odyssey provided the communications data link between Phoenix and Earth throughout the entire entry, descent and landing phase. MRO’s powerful HiRISE camera took unprecedented high-resolution images of multiple landing site options. The images gave analysts a preview of the potential landing sites, allowing them to determine which area was the least risky. MRO also received Phoenix data during its journey to the surface, but the orbiter recorded the data and sent it back to Earth at a later time. Both MRO and Odyssey spacecraft were built by Lockheed Martin and both are operated for JPL by the company.
Lockheed Martin has been an industry partner with NASA and the JPL for more than three decades on many interplanetary missions that have ushered in a new and exciting era in the scientific study of our universe and, particularly Mars. Beginning in 1971 with the Atlas/Centaur launch of Mariner 9 as well as the Viking missions in 1976, and continuing with aero shell and heat shield development for the Mars Science Laboratory, Lockheed Martin has been at the forefront in the development of spacecraft and systems used to explore Mars.
Lockheed Martin Space Systems Company, a major operating unit of Lockheed Martin Corporation, designs, develops, tests, manufactures and operates a full spectrum of advanced-technology systems for national security, civil and commercial customers. Chief products include human space flight systems; a full range of remote sensing, navigation, meteorological and communications satellites and instruments; space observatories and interplanetary spacecraft; laser radar; fleet ballistic missiles; and missile defense systems.
Headquartered in Bethesda, Md., Lockheed Martin employs about 140,000 people worldwide and is principally engaged in the research, design, development, manufacture, integration and sustainment of advanced technology systems, products and services. The Corporation reported 2007 sales of $41.9 billion.

 When the Boeing Co. lost the Joint Strike Fighter competition to Lockheed Martin in 2001, its days as a fighter-jet maker may have appeared over.
When the Boeing Co. lost the Joint Strike Fighter competition to Lockheed Martin in 2001, its days as a fighter-jet maker may have appeared over. 




 Usually provided with mechanical arms or actuators, the formers are heavily used in case of deep underwater intervention where no other means are possible. The dimensions of these machines are rather relevant due to the power needed to cope with the umbilical cable's drag (at few km depth the cable length can "wag the dog"), sea currents, and mission tasks (move objects, grab samples or repair damages). Military, marine intervention companies, and of course oceanographic and research institutions, are the main producer and user of such technology. A comprehensive list of vehicles and companies can be found on the ROV Committee of the Marine Technology Society and even more details on the Rons ROV Links. Among them are companies such Perry Slingsby Systems (triton), Oceaneering International (magnum, millennium, crov), and research institutions as the Japanese Jamstek (Kaiko, urov7k, dolphin) and the American Woods Hole (Jason).
Usually provided with mechanical arms or actuators, the formers are heavily used in case of deep underwater intervention where no other means are possible. The dimensions of these machines are rather relevant due to the power needed to cope with the umbilical cable's drag (at few km depth the cable length can "wag the dog"), sea currents, and mission tasks (move objects, grab samples or repair damages). Military, marine intervention companies, and of course oceanographic and research institutions, are the main producer and user of such technology. A comprehensive list of vehicles and companies can be found on the ROV Committee of the Marine Technology Society and even more details on the Rons ROV Links. Among them are companies such Perry Slingsby Systems (triton), Oceaneering International (magnum, millennium, crov), and research institutions as the Japanese Jamstek (Kaiko, urov7k, dolphin) and the American Woods Hole (Jason). (Seamor) the English to buy, deploy and use rather sophisticated vehicle. Some companies excel among others like for example: the Canadian InuktunSeaEye (falcon, panther) and the American SeaBotix with the innovative LBV. Don Rodocker founder of SeaBotix and father of the Hyball by Hydrovision wanted a valuable and affordable ROV for everybody. The size, flexibility and prize of the Little Benthic Vehicle (LBV) are hard to beat among ROVs. Still it has to be mentioned a class by itself with the Swedish Mark III and Mark IV (Double Eagle) designed by Gunnar Wänström founder of SuTech (now part of the Saab-Bofors Group): the first Holonom ROV available on the market. In 2006, together with the guys of Ocean Modules, Mr Wänström designed the superlight OM V8 Sii, joined recently by the superlative V8 Offshore: another two excellent ROVs in the Holonom company tradition.
(Seamor) the English to buy, deploy and use rather sophisticated vehicle. Some companies excel among others like for example: the Canadian InuktunSeaEye (falcon, panther) and the American SeaBotix with the innovative LBV. Don Rodocker founder of SeaBotix and father of the Hyball by Hydrovision wanted a valuable and affordable ROV for everybody. The size, flexibility and prize of the Little Benthic Vehicle (LBV) are hard to beat among ROVs. Still it has to be mentioned a class by itself with the Swedish Mark III and Mark IV (Double Eagle) designed by Gunnar Wänström founder of SuTech (now part of the Saab-Bofors Group): the first Holonom ROV available on the market. In 2006, together with the guys of Ocean Modules, Mr Wänström designed the superlight OM V8 Sii, joined recently by the superlative V8 Offshore: another two excellent ROVs in the Holonom company tradition. Whenever is possible other means are more than welcome. In the case of underwater survey where a "simple" flyby is requested AUVs are rapidly taking the place of ROVs and towed probes. Their success is due to the capability of working nearly 24h/day and to complete a survey mission (at fixed altitude, generating bathymetry maps with constant resolution) in often one third (or one fourth) of the time needed with other solutions. Moreover AUVs have been used under the North Pole ices where it would have been impossible to a ship to pursuit the robots. Thanks to the sophisticated payload and on board sensors and electronics, AUVs are so reliable to be launched and retrieved, even from a hole on the ice in the middle of the Arctic Ocean. A certain number of companies are producing and selling AUVs: among them (Maridan), ISE (Theseus, Explorer), Atlas MaridanKongsberg Simrad (Hugin 3000, c'inspector). More or less the same concept we saw with the ROVs is happening for the AUVs: there is even a class of smaller AUVs but not less technologically advanced. The first of them come directly from academic research (as Maridan) yielding very reliable and advanced product. We can enumerate the MIT blazoned Bluefin Robotics (Odyssey) recently innovating with Hovering AUVs (Odyssey IV), the very experienced Hydroid (the famous REMUS) with a remarkable 70 AUVs sold, the more recent Sias Patterson (Fetch2), the Icelander Hafmynd (Gavia) listing US-Navvy among its customers, and the newborn Ocean Server Technology's Iver2. An exhaustive list of AUVs can be found in Professor Uwe Zimmer's site and again on Rons ROV Links.
Whenever is possible other means are more than welcome. In the case of underwater survey where a "simple" flyby is requested AUVs are rapidly taking the place of ROVs and towed probes. Their success is due to the capability of working nearly 24h/day and to complete a survey mission (at fixed altitude, generating bathymetry maps with constant resolution) in often one third (or one fourth) of the time needed with other solutions. Moreover AUVs have been used under the North Pole ices where it would have been impossible to a ship to pursuit the robots. Thanks to the sophisticated payload and on board sensors and electronics, AUVs are so reliable to be launched and retrieved, even from a hole on the ice in the middle of the Arctic Ocean. A certain number of companies are producing and selling AUVs: among them (Maridan), ISE (Theseus, Explorer), Atlas MaridanKongsberg Simrad (Hugin 3000, c'inspector). More or less the same concept we saw with the ROVs is happening for the AUVs: there is even a class of smaller AUVs but not less technologically advanced. The first of them come directly from academic research (as Maridan) yielding very reliable and advanced product. We can enumerate the MIT blazoned Bluefin Robotics (Odyssey) recently innovating with Hovering AUVs (Odyssey IV), the very experienced Hydroid (the famous REMUS) with a remarkable 70 AUVs sold, the more recent Sias Patterson (Fetch2), the Icelander Hafmynd (Gavia) listing US-Navvy among its customers, and the newborn Ocean Server Technology's Iver2. An exhaustive list of AUVs can be found in Professor Uwe Zimmer's site and again on Rons ROV Links.  Despite most of them develop survey AUVs few innovative companies and research institutions are designing and producing intervention AUVs: some of them has been cooperating in a 1.2 M€ EU funded "Freesub Project" (HPRN-CT-2000-00032) which already in November 2003 delivered ALIVE the first intervention AUV realized by Cybernetix. As a evolution of the proven concept the english Seebyte and Subsea7 "have joined forces to develop the next generation of AUV for the offshore oil and gas industry" as they recently stated. As we did for the ROVs even for AUVs has to be mentioned a class by its own; the only AUV capable to claim an unlimited autonomy: the solar powered autonomous underwater vehicle (SAUV II), realized by Richard Blidberg and its team at the Autonomous Undersea Systems Institute (AUSI).
Despite most of them develop survey AUVs few innovative companies and research institutions are designing and producing intervention AUVs: some of them has been cooperating in a 1.2 M€ EU funded "Freesub Project" (HPRN-CT-2000-00032) which already in November 2003 delivered ALIVE the first intervention AUV realized by Cybernetix. As a evolution of the proven concept the english Seebyte and Subsea7 "have joined forces to develop the next generation of AUV for the offshore oil and gas industry" as they recently stated. As we did for the ROVs even for AUVs has to be mentioned a class by its own; the only AUV capable to claim an unlimited autonomy: the solar powered autonomous underwater vehicle (SAUV II), realized by Richard Blidberg and its team at the Autonomous Undersea Systems Institute (AUSI).





